

ARS Control Logic
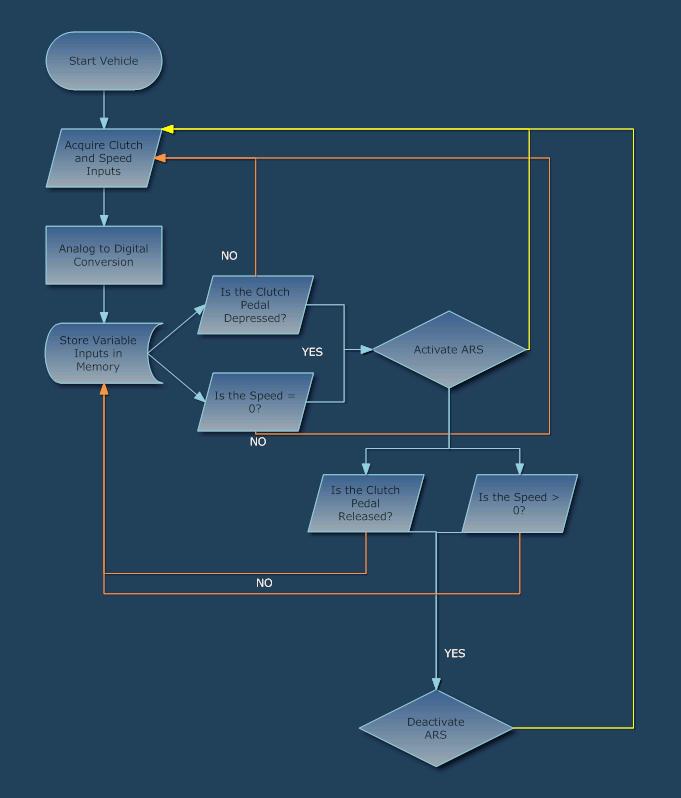
With the vehicle started, the microcontroller powers on and acquires input signals from the related sensors. These include the clutch pedal and a reading from the vehicle speed sensor. The signal acquired from the speed sensor is converted from an analog signal to a digital signal for interpretation via the microcontroller. These inputs are then stored in their respective variables locations from which the controller decides whether the conditions satisfy activation of the solenoid valves, thus preventing the vehicle from rolling when the driver is ready to resume motion. If either of the conditions is not satisfied before or after activation of the ARS, the system remains in its inactive state.
The control algorithm is constantly checking the input variables at a rapid rate for changes thus preventing any delays in activation or deactivation of the ARS.
![]()
